
|
xtd
0.2.0
|
Loading...
Searching...
No Matches
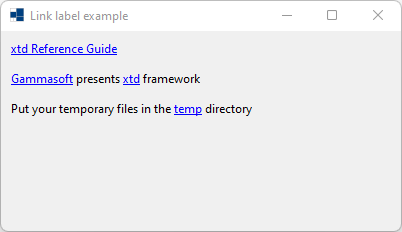
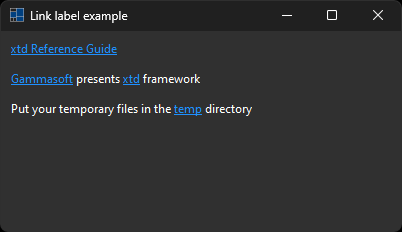
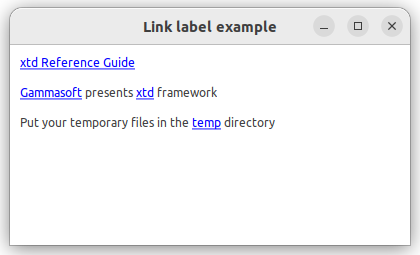
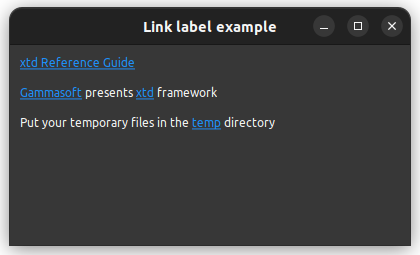
link_label.cpp
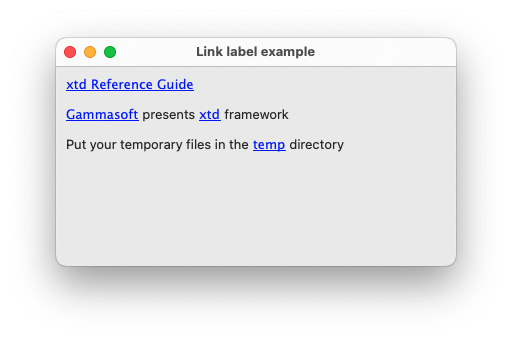
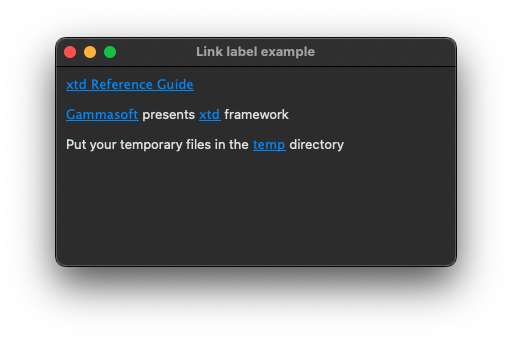
demonstrates the use of xtd::forms::link_label control.
- Windows
- macOS
- Gnome
#include <xtd/diagnostics/process>
#include <xtd/forms/application>
#include <xtd/forms/form>
#include <xtd/forms/link_label>
#include <filesystem>
using namespace std::filesystem;
using namespace xtd;
using namespace xtd::diagnostics;
using namespace xtd::forms;
namespace link_label_example {
public:
form1() {
text("Link label example");
client_size({400, 200});
link_label1.location({10, 10});
link_label1.auto_size(true);
link_label1.parent(*this);
link_label1.text("xtd Reference Guide");
e.visited(true);
process::start("https://gammasoft71.github.io/xtd/reference_guides/latest/index.html");
};
link_label2.location({10, 40});
link_label2.auto_size(true);
link_label2.parent(*this);
link_label2.text("Gammasoft presents xtd framework");
link_label2.links().push_back({0, 9, "https://gammasoft71.wixsite.com/gammasoft"});
link_label2.links().push_back({19, 3, "https://gammasoft71.github.io/xtd"});
link_label2.link_clicked += [](object & sender, link_label_clicked_event_args & e) {
e.visited(true);
process::start(as<string>(e.link().link_data()));
};
link_label3.location({10, 70});
link_label3.auto_size(true);
link_label3.parent(*this);
link_label3.text("Put your temporary files in the temp directory");
link_label3.links().push_back({32, 4, temp_directory_path()});
link_label3.link_clicked += [](object & sender, link_label_clicked_event_args & e) {
process::start(as<path>(e.link().link_data()).string());
};
}
private:
link_label link_label1;
link_label link_label2;
link_label link_label3;
};
}
auto main() -> int {
application::run(link_label_example::form1 {});
}
Represents a window or dialog box that makes up an application's user interface.
Definition form.hpp:54
Represents a Windows label control that can display hyperlinks.
Definition link_label_clicked_event_args.hpp:29
Represents a Windows label control that can display hyperlinks.
Definition link_label.hpp:43
The xtd::diagnostics namespace provides classes that allow you to interact with system processes,...
Definition assert_dialog_result.hpp:10
The xtd::forms namespace contains classes for creating Windows-based applications that take full adva...
Definition xtd_about_box.hpp:12
The xtd namespace contains all fundamental classes to access Hardware, Os, System,...
Definition xtd_about_box.hpp:10
Generated on Sun Dec 1 2024 09:55:44 for xtd by Gammasoft. All rights reserved.